WhaleBot鲸鱼小车: 安装-2
简介
本文是 WhaleBot 安装教程的第二部分,继续介绍硬件组装和接线步骤。
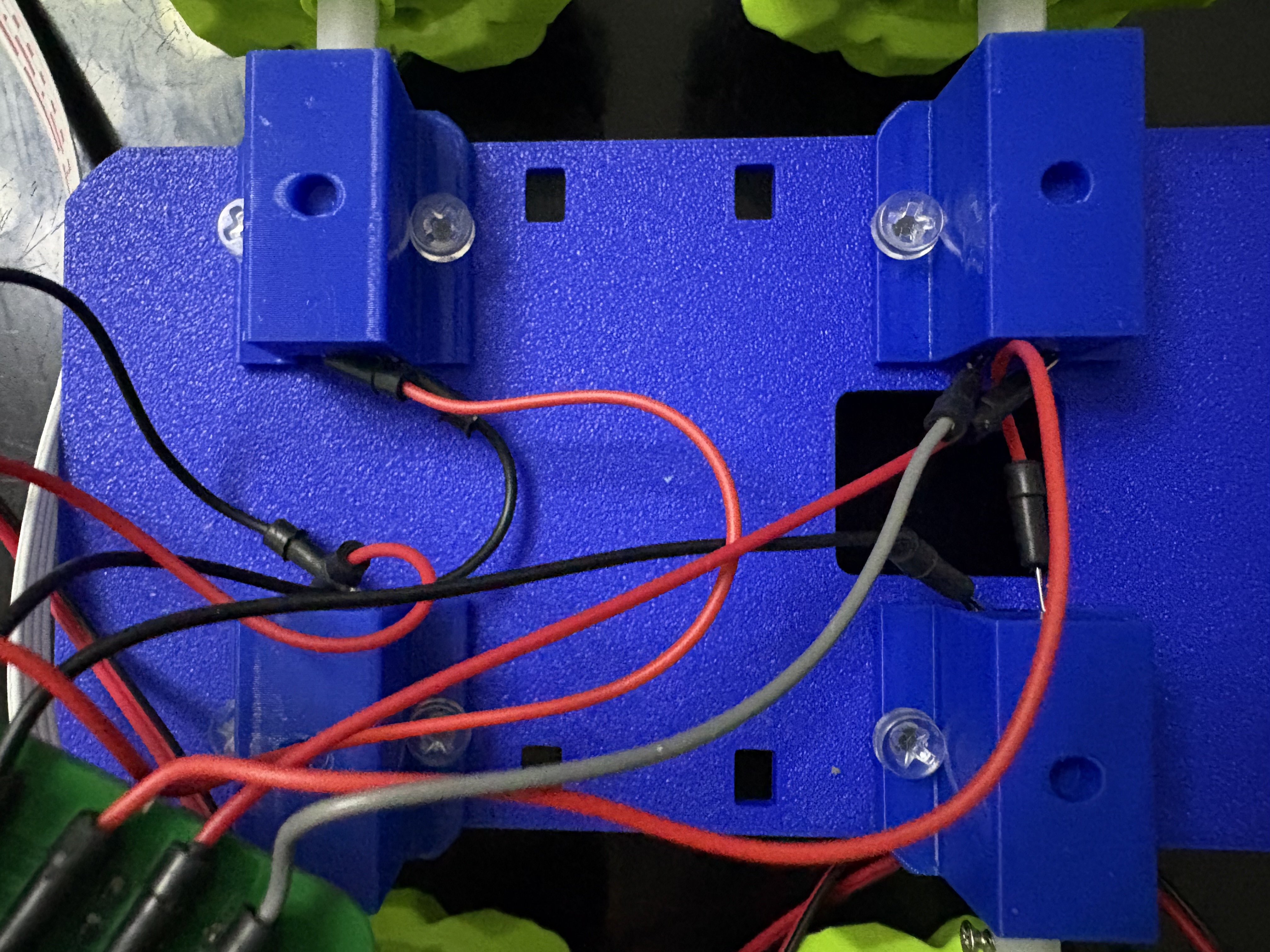
硬件组装步骤(续)
步骤 2: 安装电机与驱动模块

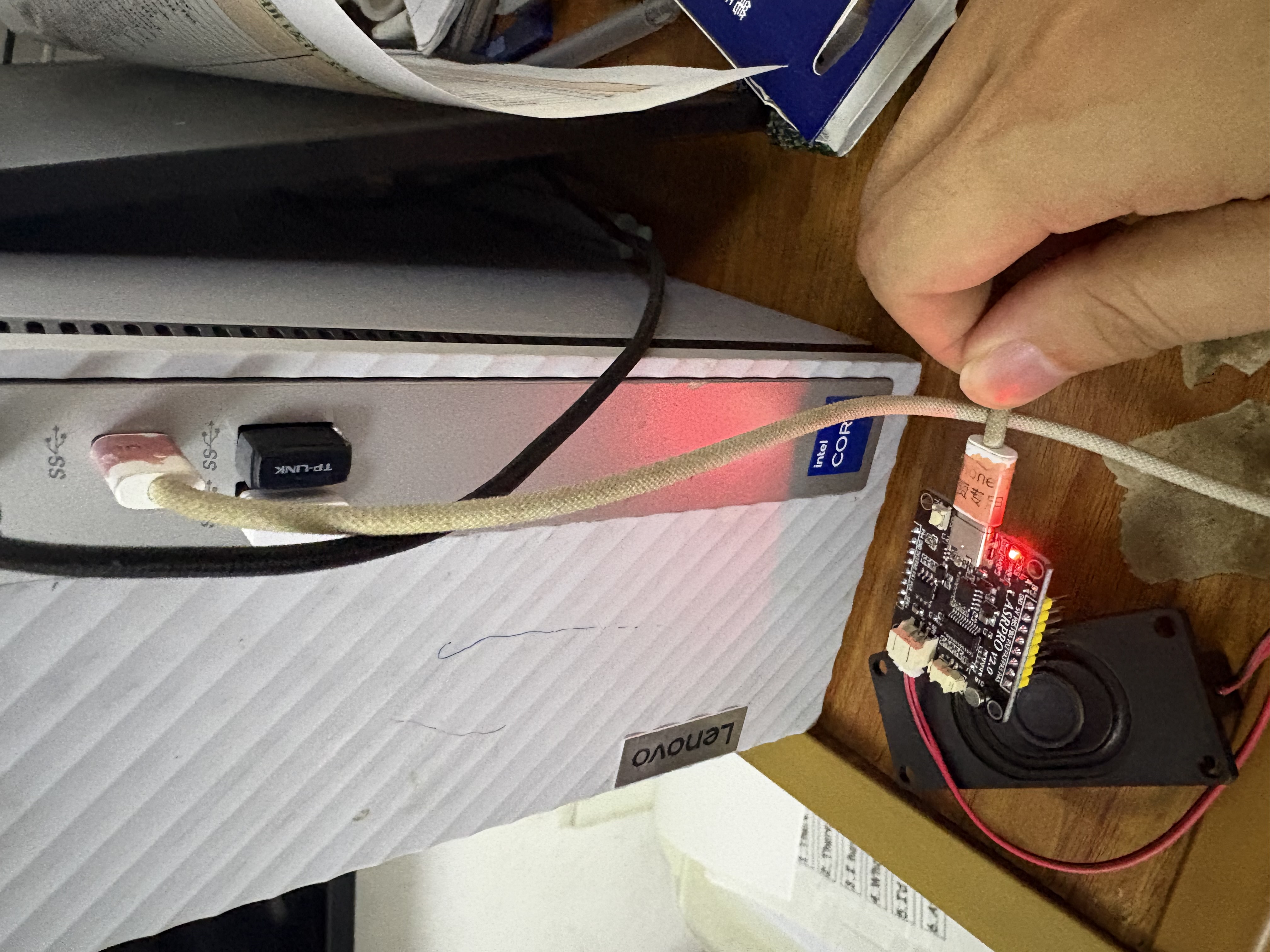
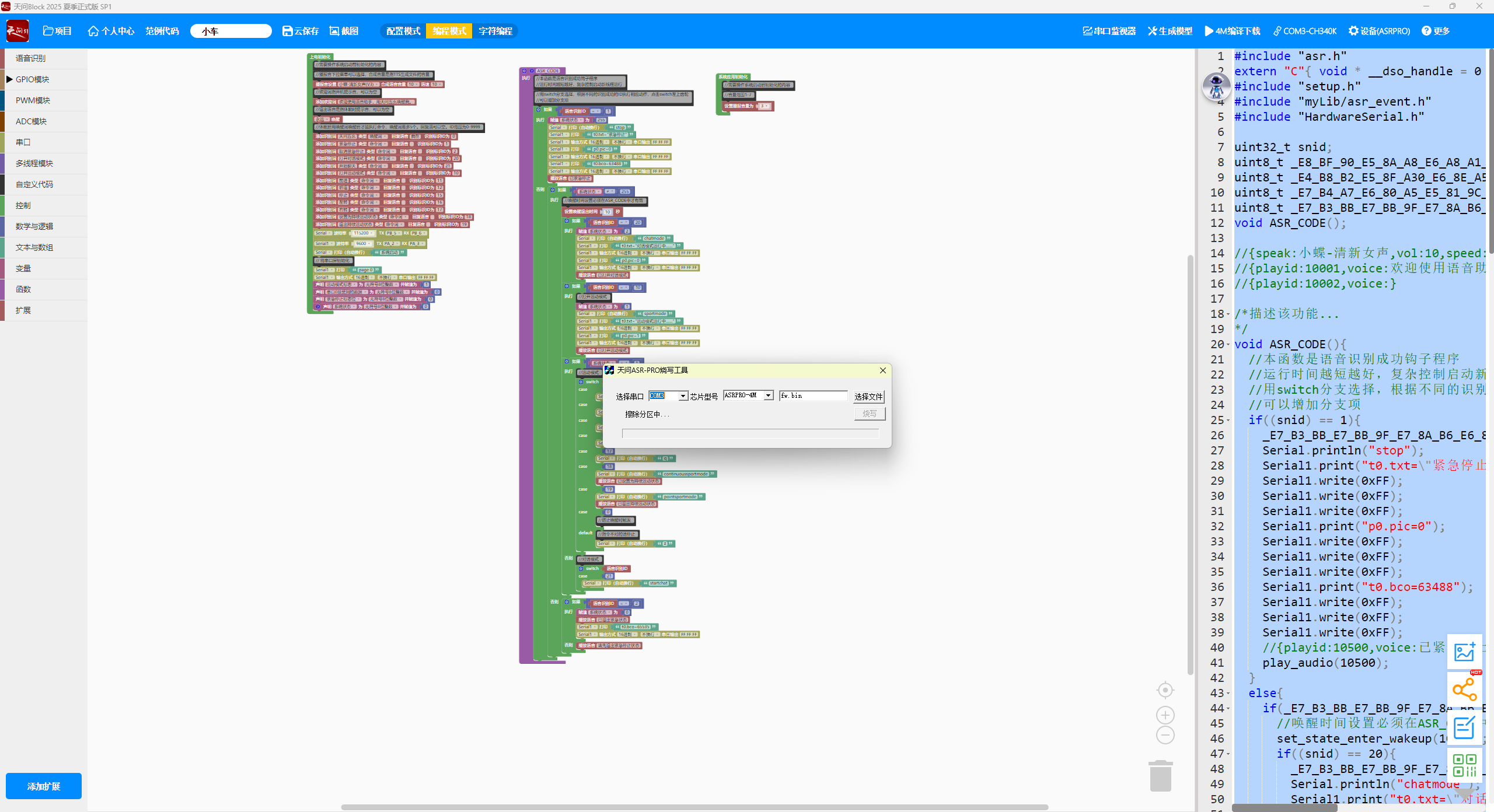
天问51 ASRPRO 的烧录
天问BLOCK 下载地址:http://twen51.com/new/twen51/index.php
串口
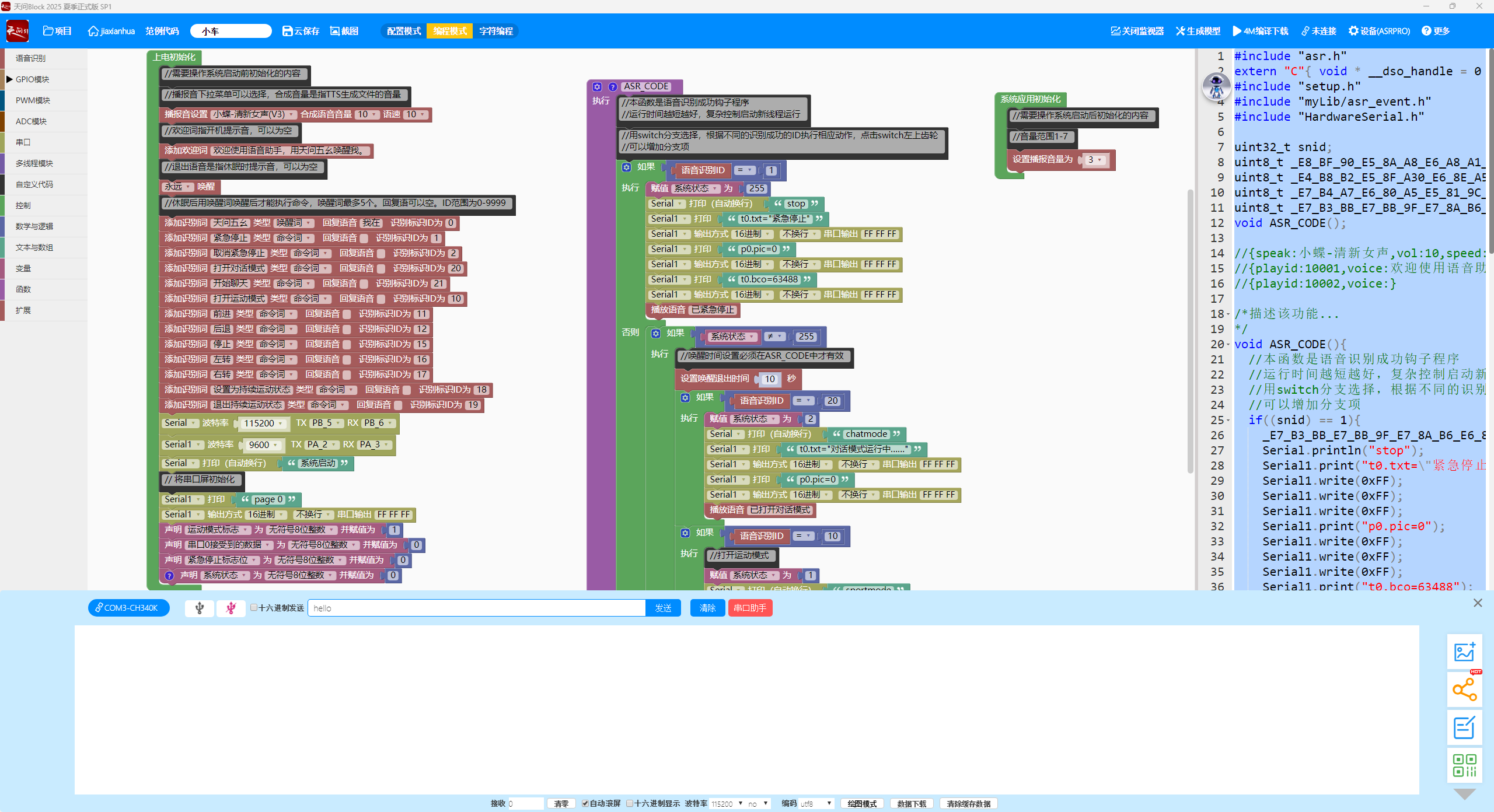

| 语音指令 | 执行内容 (TTS/Action) | 指令摘要 |
|---|---|---|
| 天问五幺 | 🔊 播报:“我在” | 设备唤醒词 ,用于激活语音交互状态。 |
| 紧急停止 | 已紧急停止 | 最高优先级指令 ,触发急停逻辑,中断当前所有动作。 |
| 取消紧急停止 | 已退出紧急状态 | 解除急停锁定状态,恢复设备待机。 |
| 打开对话模式 | 已打开对话模式 | 切换系统至对话交互逻辑,准备接收聊天指令。 |
| 开始聊天 | 🔇 无语音回复 | 触发聊天功能模块。 |
| 打开运动模式 | 已打开运动模式 | 切换系统至运动控制逻辑,激活电机/底盘控制。 |
| 前进 | 🔇 无语音回复 | 控制设备向前移动。 |
| 后退 | 🔇 无语音回复 | 控制设备向后移动。 |
| 停止 | 🔇 无语音回复 | 结束当前移动指令,设备归零/刹车。 |
| 左转 | 🔇 无语音回复 | 控制设备原地向左旋转。 |
| 右转 | 🔇 无语音回复 | 控制设备原地向右旋转。 |
| 设置为持续运动状态 | 已设置为持续运动状态 | 更改运动逻辑为“保持当前动作直到收到停止指令”。 |
| 退出持续运动状态 | 已退出持续运动状态 | 恢复默认运动逻辑(如点动模式或定时停止)。 |
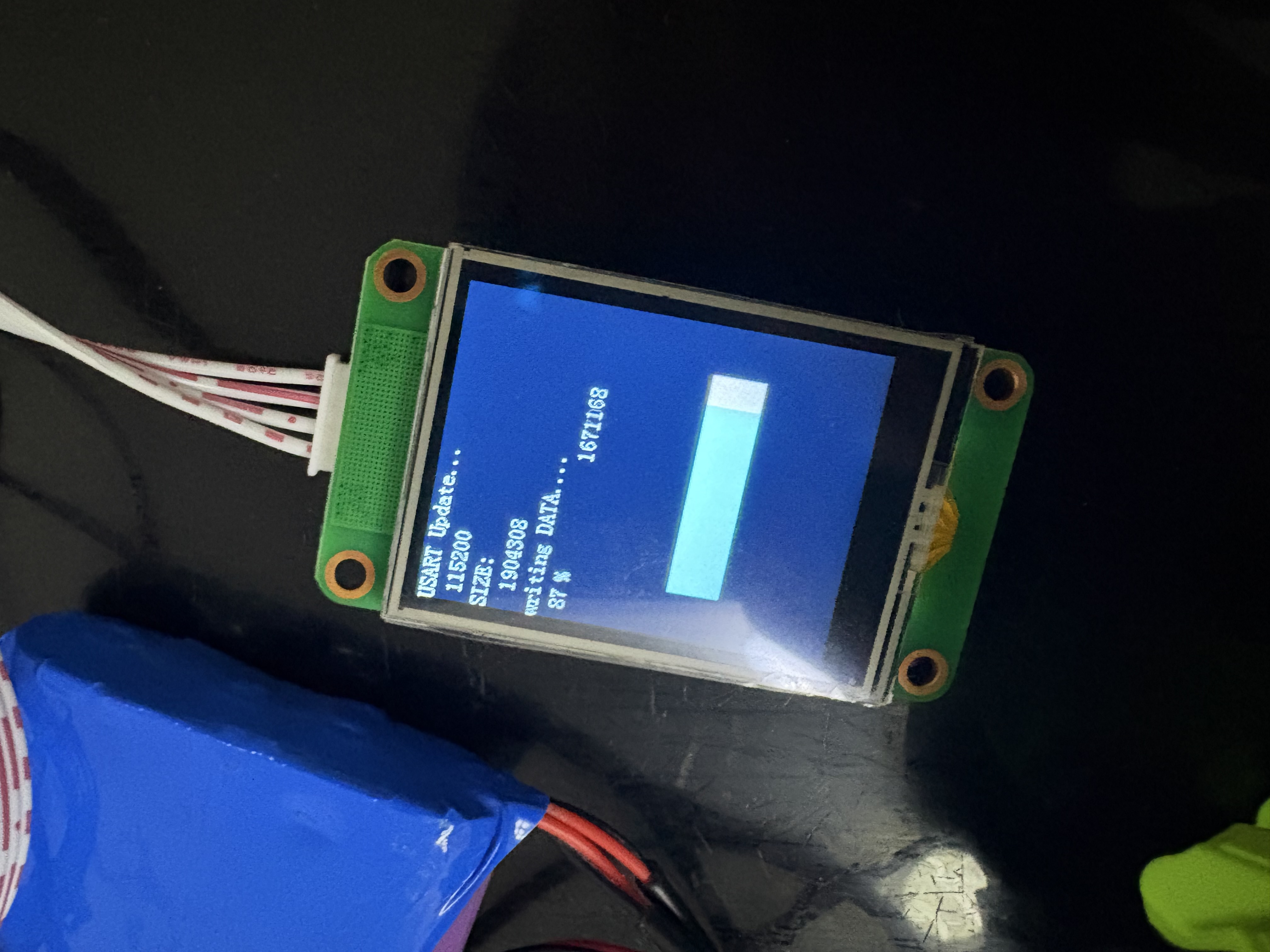
串口屏烧录及其显示内容
开发串口屏的第一步是安装官方配套的设计软件。
软件名称 :USART-HMI
下载地址 :淘晶驰官方下载页
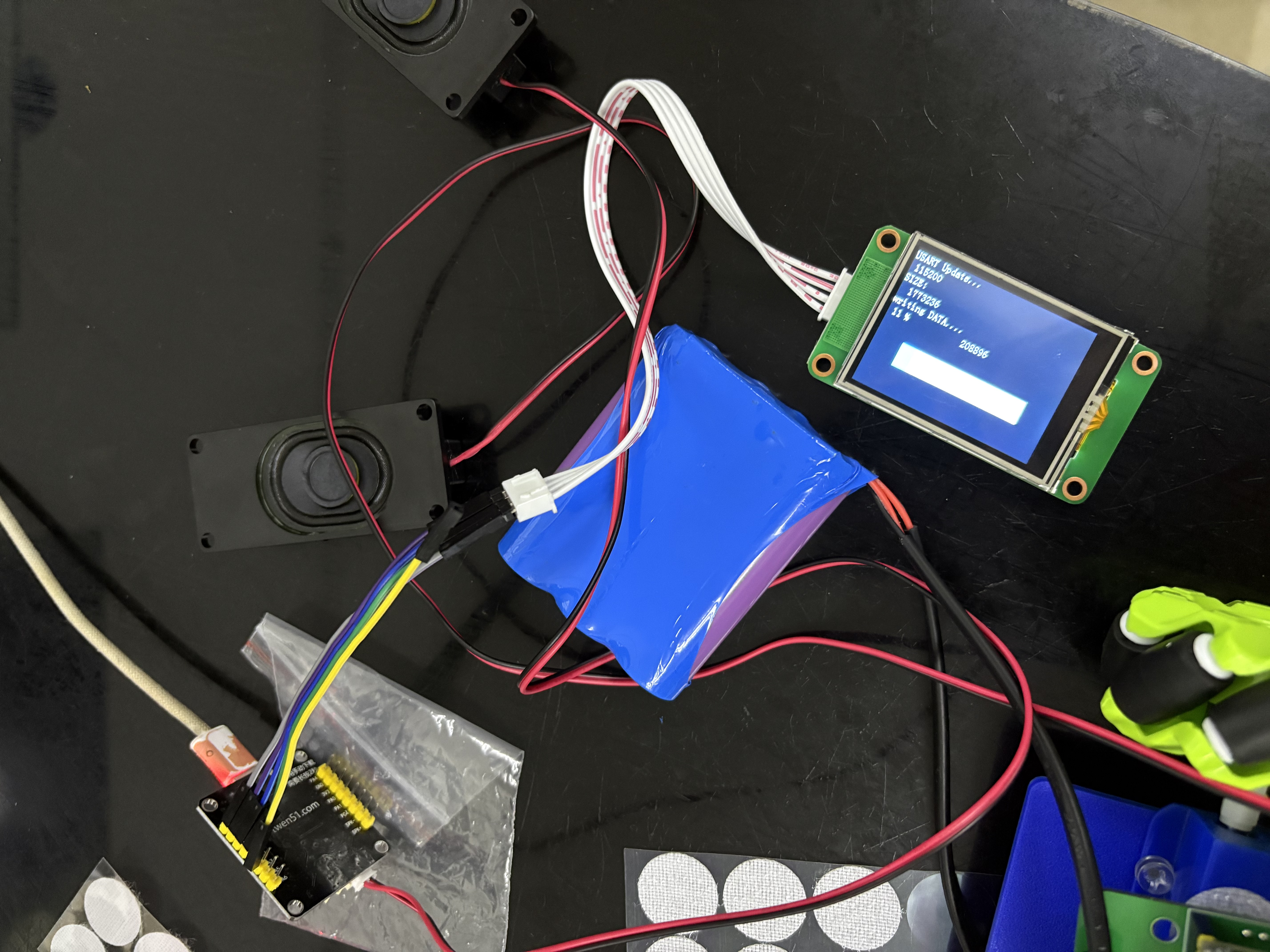
第二步是硬件的连接,这里请直接对照引脚表。1
| ASRPRO 引脚 | 串口屏引脚 | 说明 |
|---|---|---|
| 5V | 5V | 供电(务必保证电源电流充足,背光全亮时耗电较大) |
| GND | GND | 共地 |
| PB6 | RX | ASRPRO 发送,屏幕接收 |
| PB5 | TX | 屏幕发送,ASRPRO 接收 |
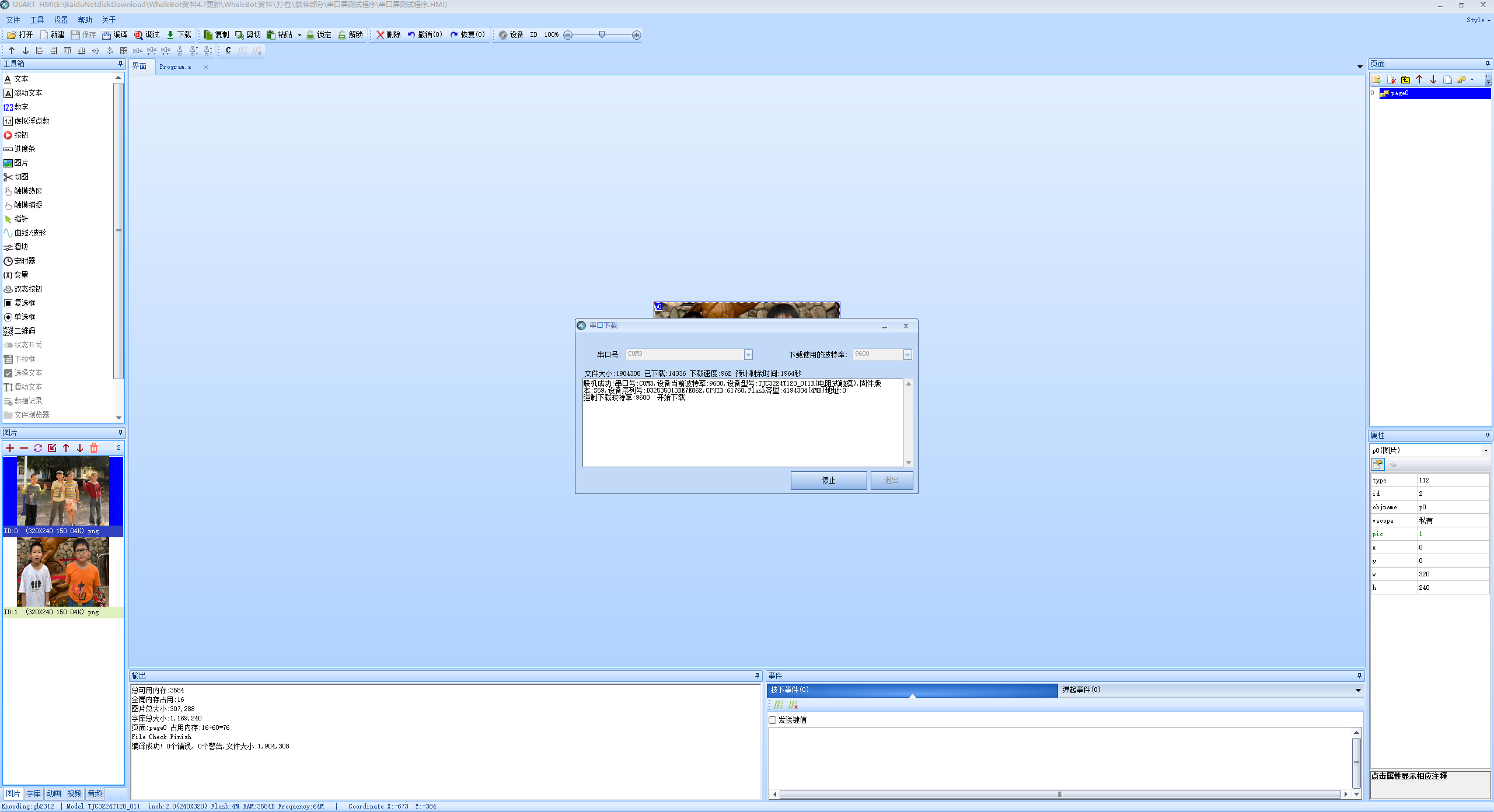
9600 下载太慢了
改为 115200
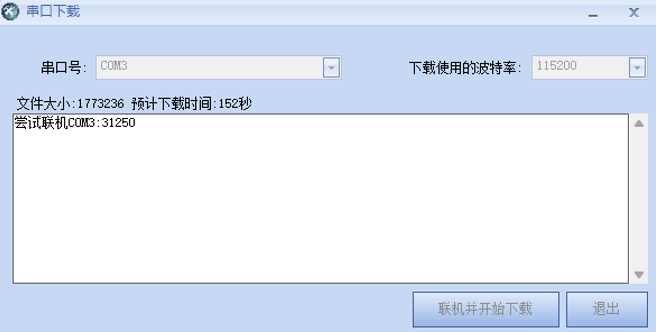
联机成功!串口号:COM3,设备当前波特率:9600,设备型号:TJC3224T120_011R(电阻式触摸),固件版本:S56,设备序列号:D32535013BE7E862,CPUID:61760,Flash容量:4194304(4MB)地址:0 强制下载波特率:115200 开始下载



开机运动测试
整体组装完成
这时可以语音控制智能小车运动。
参考链接
希望本教程对您有所帮助!如果您有任何问题或建议,请在评论区留言。